Como en el desarrollo de cualquier maquina nueva, hay que ir paso a paso. En primer lugar, convendría preparar un prototipo y comprobar su funcionamiento. Si se es capaz de hacerla funcionar, ya se diseña a escala real. Y que necesitamos para preparar un prototipo? Básicamente un husillo que gire controlado por ordenador, y que la guía este anclada a un sistema que se desplace linealmente también controlado por ordenador. Pues resulta que ya dispongo de todo esto. Como este proyecto lo empecé antes de desarrollar el cuarto eje, tuve que buscarme la vida por otro sitio para tener un husillo giratorio al que acoplar un motor PAP. En mi taller tengo un torno pequeño, un EMCO UNIMAT, al que acoplarle un motor PAP es relativamente sencillo. Metiendo un tubo en el plato de garras, ya tenemos el husillo.

Para la guia, basta con anclar una argolla al portaherramientas de mi fresadora, y controlando solo el eje X, ya tendria el invento hecho. Facil y sencillo.
Ahora toca intentar controlarlo. Y es aqui donde entra un compañero, Sergi, que es mi electronico particular. El me ha ayudado en todo el tema electronico de mi CNC, y esta parte no iba a ser menos. Ademas, se implico bastante en esto, e incluso desarrollo un programa en C++ para generar automaticamente el codigo G , listo para ser leido en LinuxCNC. Estas eran las principales caracteristicas del programa:
Basicamente, introduciamos los datos de partida, diametro, longitud, etc..
Despues, las condiciones de funcionamiento: Paso, angulo, velocidad, etc..
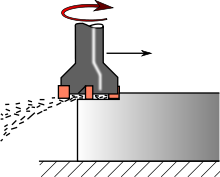
El programa generaba un codigo G donde actuaba sobre el eje A y en eje X, dandole las ordenes para que enrollara el hilo segun estos patrones. El programa resulto muy versatil, de forma que al enrollar el hilo, era capaz de seguir el mismo trayecto, desafasado una distancia determinada, para que el hilo no fuera exactamente por el mismo recorrido de la vuelta anterior. Asi se puede crear el dibujo perfecto con el hilo.


Este ha sido el resultado. En este video se aprecia como va enrollando, y como al llegar al final, da justo una vuelta entera, para continuar justo por donde estaba el hilo anterior, pero con un desfase determinado, para que no enrollara sobre el hilo anterior.
Esto evidentemente es una primera fase, sabiendo que el concepto en principio funciona, y que el control no solo se puede hacer, si no que funciona bastante bien, ya se podria dar el siguiente paso. Desarrollar la maquina de verdad. Pero eso es otro paso que ya comentaremos mas adelante.
Fuente: este post proviene de o3ozono, donde puedes consultar el contenido original.
¿Vulnera este post tus derechos? Pincha aquí.
Modificado: